Robot gripper (Z-tech)
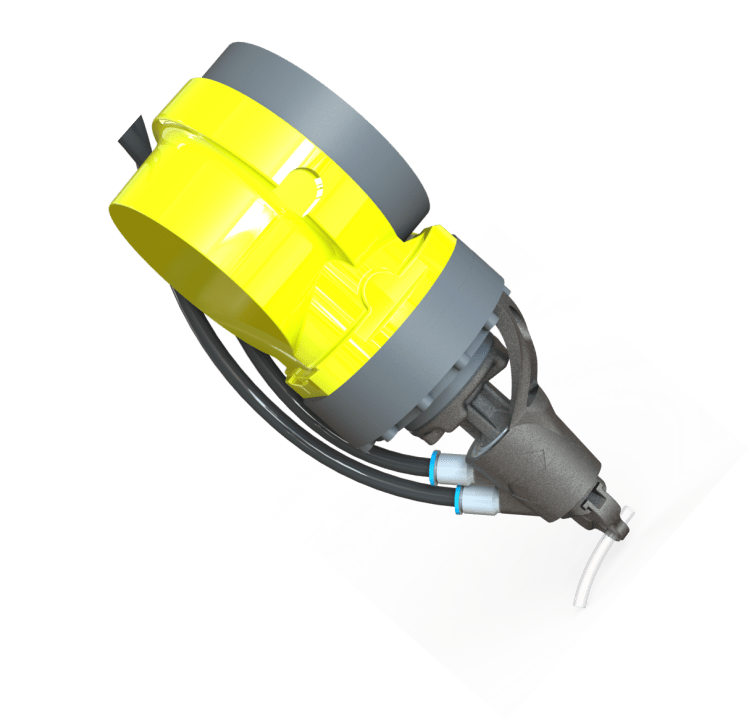
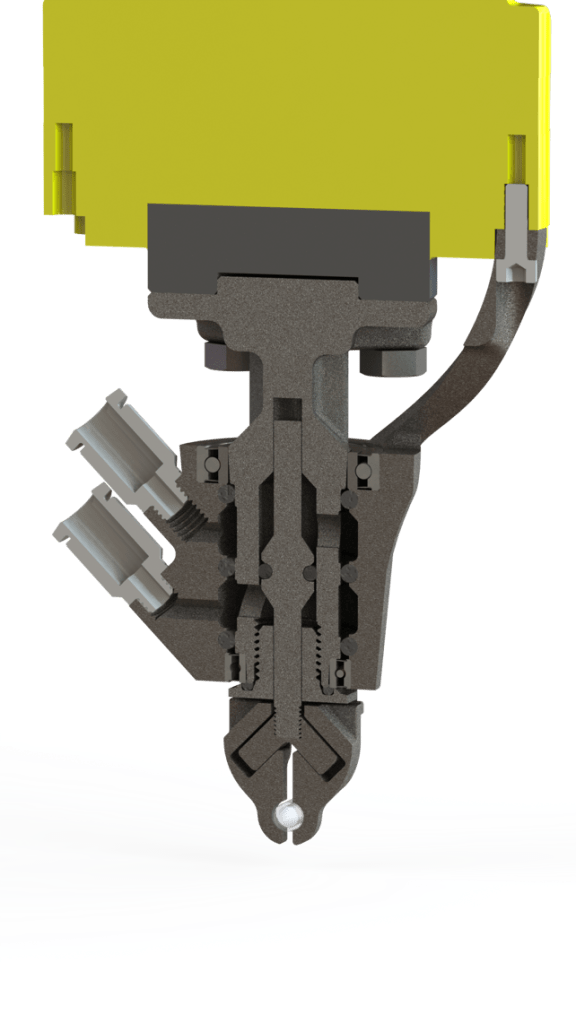
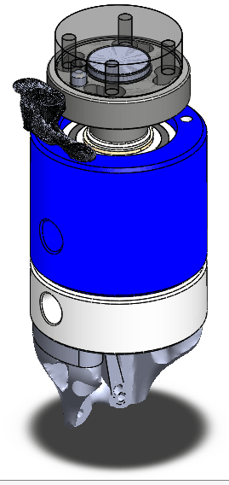
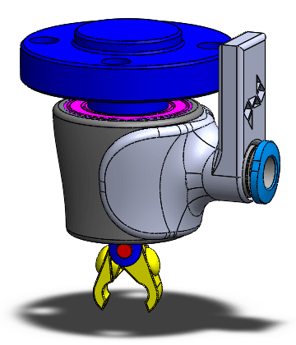
• Goal: The goal of this project is to have fully analyzed the current gripper (figure 1.3) by the end of the graduation period (31 June) (1) and to develop a new gripper on the basis of this analysis (2) with metal printing in mind (3). The gripper must be fully substantiated and the built-in principles must be proven (4). The developed model must also be a physical model that is identical in all respects to the digital model (5).
• Approach: Design process
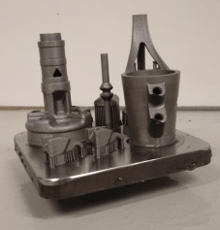
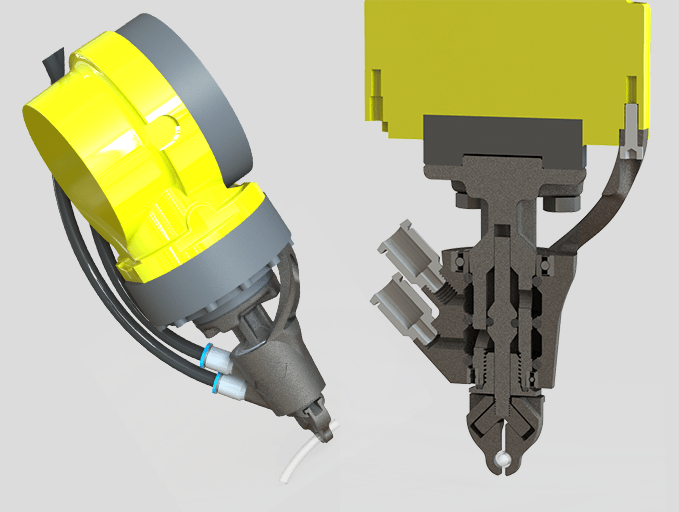
• Result: From +50 parts to 18, of which 7 printed parts. Volume saving of 90% and weight reduction of 82%. The whole can be assembled with minimal rework.
• Profit for the company: Almost fully developed product. Entire way of designing / rethinking for 3D printing
Graduation assignment: Timo Grootelaar